





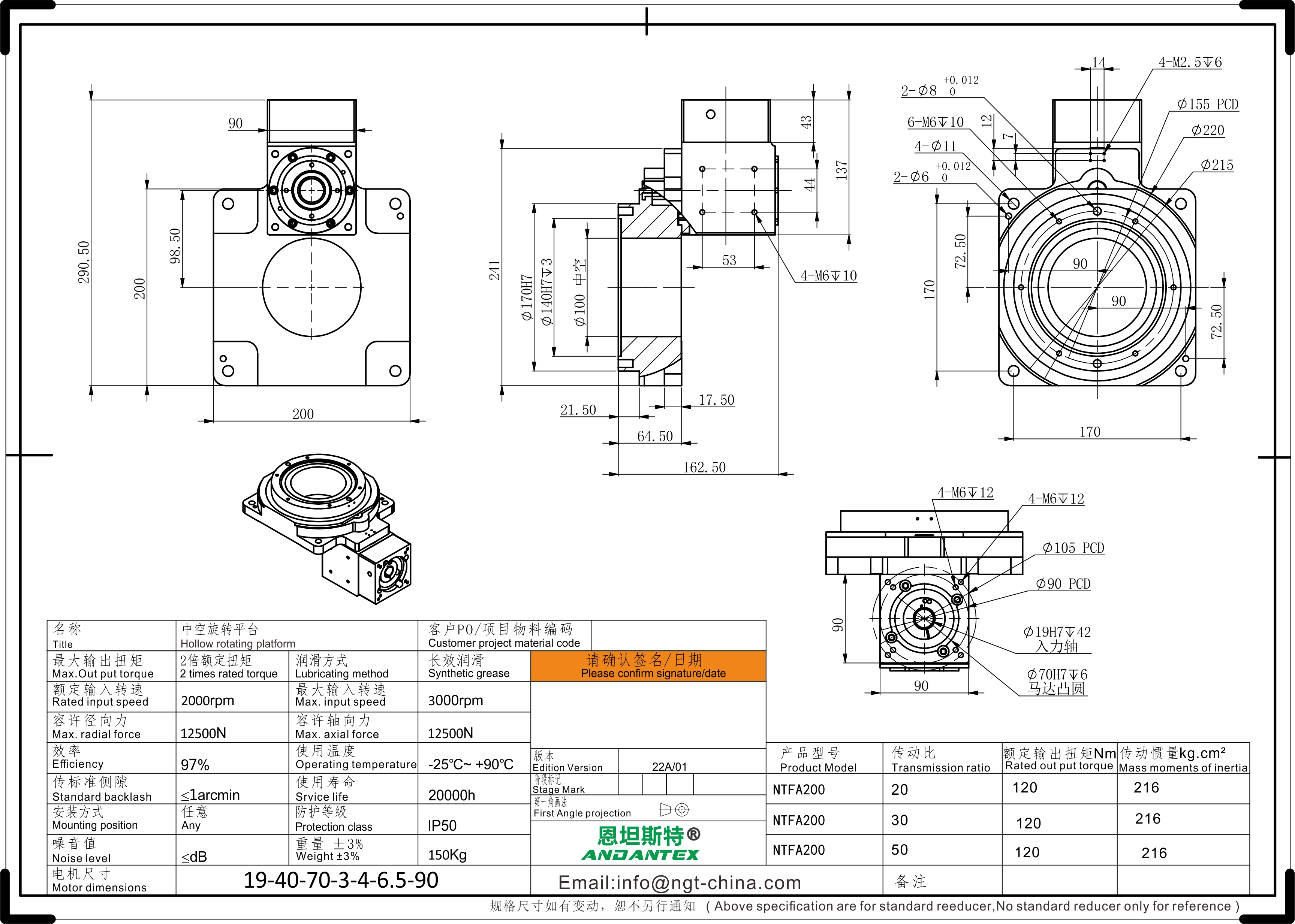
Специфікація
особливості
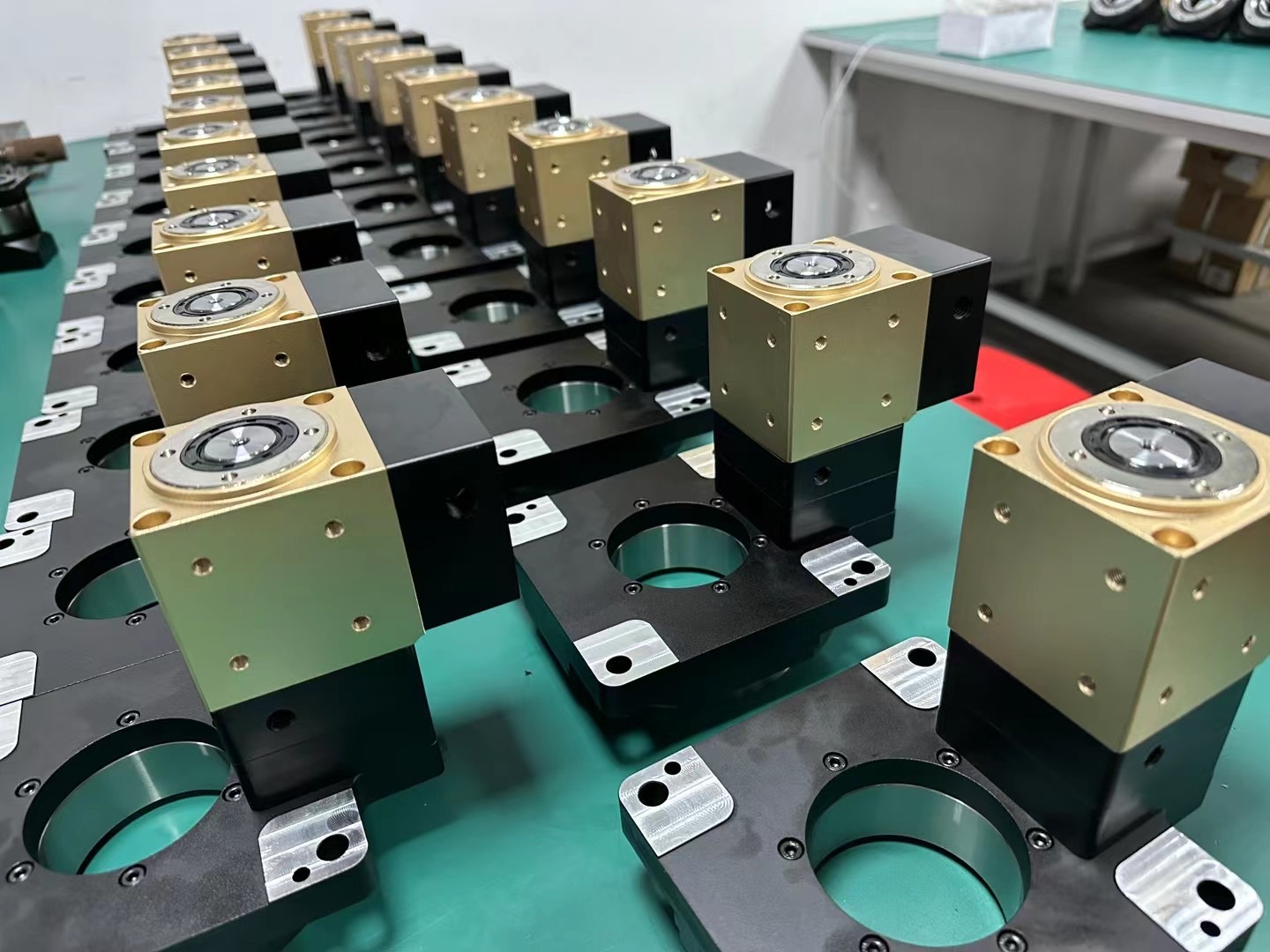
Порожниста поворотна платформа під прямим кутом використовується в машинах і обладнанні з технологією поверхневого монтажу (SMT) у такі способи:
Економія місця: завдяки порожнистій конструкції кабелі та повітряні трубки можна розташувати всередині платформи, заощаджуючи місце в обладнанні та підвищуючи гнучкість загального макета.
Високоточне обертання: платформа здатна до високоточного обертального руху, що підходить для процесів SMT, які вимагають точного позиціонування, наприклад розміщення, перевірки та пайки.
Рух за кількома осями: у поєднанні з іншими платформами руху порожниста поворотна платформа під прямим кутом може реалізовувати складний рух за кількома осями для задоволення різних вимог процесу.
Підвищення продуктивності: завдяки швидкому обертанню та позиціонуванню час перемикання обладнання скорочується, що підвищує продуктивність.
Довговічність і стабільність: зазвичай виготовляється з високоміцних матеріалів, він може витримувати значні навантаження та забезпечувати стабільність у високоінтенсивних робочих середовищах.
Гнучкість застосування: може широко використовуватися в різноманітному обладнанні SMT, такому як машини для розміщення, обладнання для перевірки та автоматизовані складальні лінії.
Коротше кажучи, прямокутна порожниста обертова платформа забезпечує ефективні, гнучкі та точні рішення в машинах і обладнанні SMT, сприяючи автоматизації та інтелектуальному розвитку сучасного електронного виробництва.
Додатки
У машинах і обладнанні SMT (Технологія поверхневого монтажу) реалізація багатоосьового руху є важливою для задоволення вимог складних вузлів. Гнучкість і висока точність порожнистих поворотних столиків під прямим кутом робить їх ідеальними для реалізації багатовісного руху. Ці ступені часто використовуються в поєднанні з іншими типами етапів руху, такими як лінійні ковзання, підйомні ступені тощо, для створення багатовимірної системи руху. За допомогою точних систем керування та алгоритмів руху прямокутні порожнисті поворотні платформи можна скоординувати для реалізації рухів, включаючи, але не обмежуючись ними, двовимірні (площина XY) і тривимірні (простір XYZ) рухи.
Система керування відіграє вирішальну роль у реалізації механізму багатоосьового руху. Сучасна технологія керування рухом використовує серводвигуни та високопродуктивні кодери, які здатні контролювати та регулювати стан сцени в реальному часі. Серводвигуни забезпечують точне обертання та переміщення, а датчики високої роздільної здатності забезпечують зворотний зв’язок щодо поточного положення. У результаті, поєднуючи прямокутні порожнисті поворотні ступені з розширеним програмним забезпеченням керування рухом, інженери можуть програмувати складні траєкторії руху та логіку керування, щоб гарантувати, що обладнання досягає високої точності та швидкості під час багатоосьового руху.
Вміст пакета
1 x захист від перламутрової бавовни
1 x спеціальна піна для ударостійкості
1 х спеціальна картонна або дерев'яна коробка










